Imaginez un jour recevoir un soin thérapeutique par l'entremise d'un système robotisé permettant à votre thérapeute en réadaptation de vous guider à distance grâce à une interface capable de communiquer de manière bidirectionnelle les mouvements de chacun. Cette avenue paraît invraisemblable, mais les travaux menés par Clément Gosselin, professeur au Département de génie mécanique, et son équipe nous prouvent que cette idée pourrait se concrétiser.
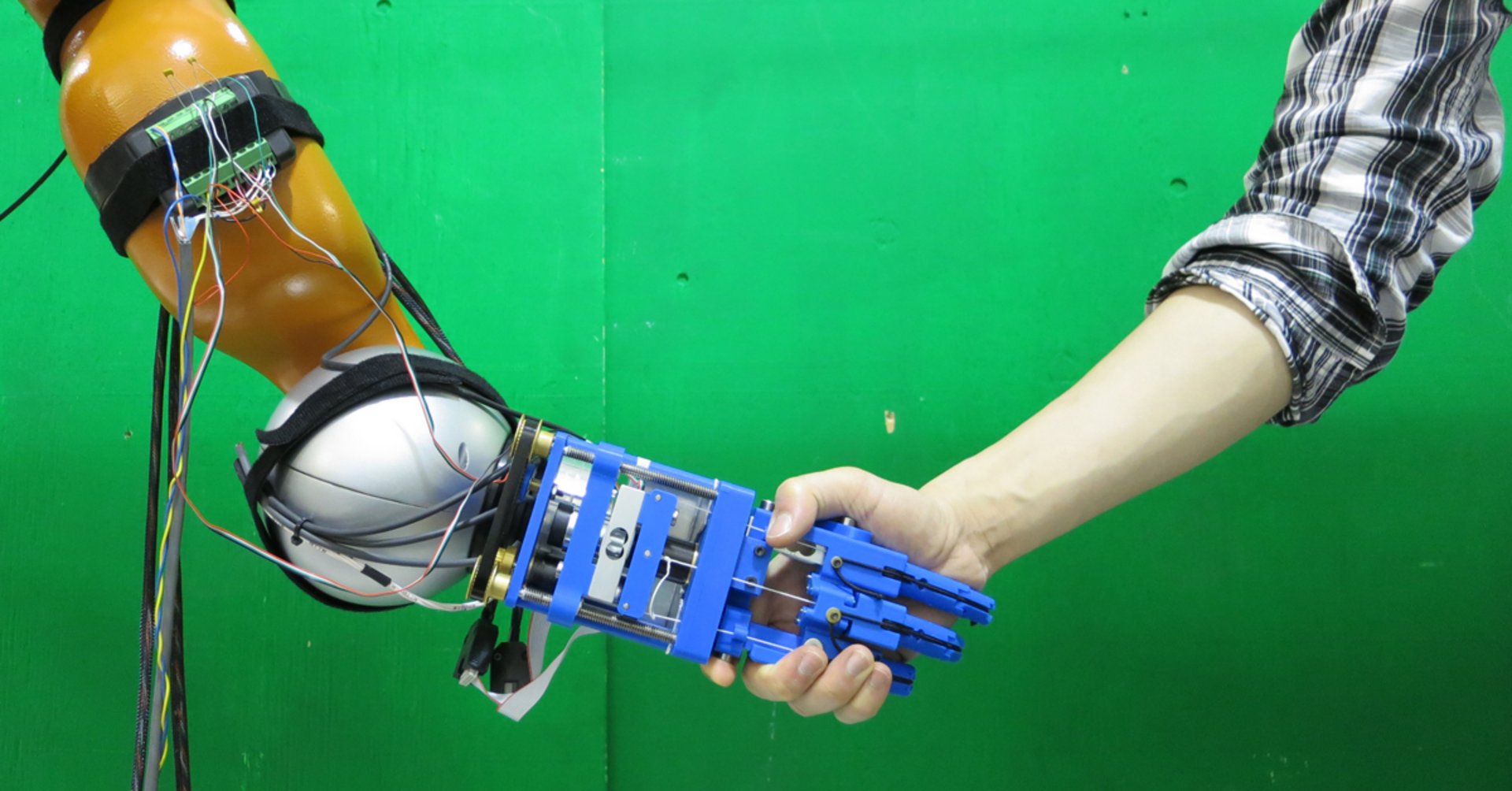
Appelé HARRI (Handshaking Anthropomorphic Reactive Robotic Interface), ce système robotisé développé par M. Gosselin et son équipe du Laboratoire de robotique de l'Université Laval relève le premier défi qu'ils s'étaient lancé, celui de reproduire, de façon réaliste, l'un des gestes les plus courants chez l'humain, c'est-à-dire la poignée de main. Ce succès prometteur est d'ailleurs le fruit de leur expertise dans les préhenseurs intelligents acquise notamment par la mise au point de la main robotisée SARAH, munie de trois doigts mobiles, capable de s'adapter à la forme des objets qu'elle prend.
Publié dans le récent numéro du Journal of Mechanisms and Robotics, l'article explique comment les chercheurs, Nicolò Pedemonte, Thierry Laliberté et Clément Gosselin, ont pu concevoir HARRI.
Pour plus de détails sur ce système robotisé aux applications éventuelles en télésanté, nous vous invitons à lire l'article du Fil.
21 mars 2016